Einige Leser fragten, was denn bei Drohnen der headless-mode ist.
Nun, die Antwort ist recht einfach.
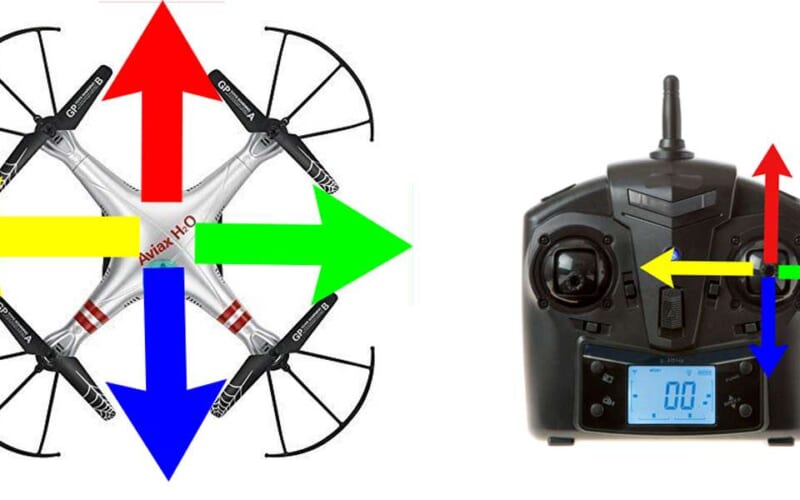
Der headless-mode bewirkt, daß der Quadcopter immer exakt in die Richtung fliegt, in die man mit der Fernsteuerung lenkt.
Das ist nämlich ohne headless-mode nicht so.
Solange man nämlich das Flugmodell von sich weg bewegen läßt, also dem Modell hinterher schaut, ist es so, als säße man in dem Modell.
Bewegt man den Steuerknüppel nach links, fliegt das Modell auch nach links. Steuert man nach rechts, fliegt der Quadcopter auch nach rechts.

Das ändert sich sofort, wenn man eine 180°-Kurve fliegt, also umdreht. Nun fliegt das Modell auf einen zu und die Verwirrung beim Piloten ist am Anfang sehr groß.
Aus Sicht des Flugzeugs ist immer noch alles richtig, aber für den Piloten am Boden ist nun alles verkehrt herum. Steuert er nach links, fliegt das Modell aus seiner Sicht auf einmal nach rechts. Erfahrenen Modellpiloten macht das nichts aus, sie denken sowieso immer aus Sicht des Modells.
Weniger erfahrene Piloten, vor allem die, die mit Quadcoptern überhaupt erst den Einstieg in die Modellfliegerei gefunden haben, tun sich da schwerer.
Solange man das Modell gut sieht und es genügend Höhe hat, mag die Umstellung nicht so sehr ins Gewicht fallen. Anders ist das, wenn man das Modell aus den Augen verloren hat, oder ganz exakt steuern muß.
Der headless-mode bewirkt nun, dass das Modell exakt so fliegt, wie Du steuerst.
Egal wohin die Nase zeigt, es bewegt sich so wie Dein Steuerknüppel.
Ziehst Du ihn zu Dir heran, fliegt das Modell auf Dich zu. Links ist links und rechts ist rechts, immer.
Der headless mode wird auch Directional Command Mode (DCM) genannt.
Dazu zwei Beispiele:
1. Modell aus den Augen verloren
Mancher wird sagen, das könne ihm nicht passieren. Ich aber sage, das wird jedem Modellpiloten passieren: Man verliert das Modell buchstäblich aus den Augen.
Du startest, läßt das Modell hoch fliegen und verfolgst es mit den Augen. Gegen den weißen und blauen Himmel siehst Du das Modell sehr gut.
Dann mußt Du blinzeln, oder Du schaust auf die Anzeige Deiner Fernbedienung, oder Du schaust aus anderen Gründen weg.
Und dann? Dann schaust Du in den Himmel, Du glaubst genau zu wissen, wo Dein Modell ist und bist sehr überrascht, daß Du es nicht wiederfinden kannst.
Du hörst schwach die Motoren, aber es wird Dir unmöglich sein, das Modell zu visualisieren.
Mit einem Tragflächenmodell würde man jetzt mit den Flügeln wackeln und einen Kreis fliegen, in der Hoffnung, diese Flugbewegungen wahrnehmen zu können.
Bei einer kleinen Drohne bringt das nichts.
Dadurch, daß Du nicht weißt, in welche Richtung es fliegen wird, wenn Du steuerst, würdest Du den Quadcopter nur noch weiter von Dir wegfliegen.
Legst Du den Steuerknüppel nach vorne, fliegt ja auch der Copter nach vorne. Nur wo ist vorne? In welche Richtung zeigt das Vorderteil?
Im ungünstigsten Fall deutet der Copter von Dir weg und Du würdest ihn ins Nirwana fliegen und eventuell nie wiederfinden.
Deshalb sollte man die Grundregel beherzigen, daß man, wenn man weit weg fliegt, auch entsprechend Höhe nimmt. Dann hat man nämlich Reserven.
Die benötigt man nun. Du holst zuerst das Modell wieder etwas herunter. Das ermöglicht Dir eventuell, es besser zu hören und lokalisieren zu können.
Wenn man nun den Steuerhebel zu sich heranzieht, sollte der Quadcopter auch wieder auf einen zufliegen.
2. Exakte Steuerung des Modells
Gerade Quadcopter mit Kamera werden ja oft dazu benutzt, um nah an Gegenstände oder Gebäude heranzufliegen, um sie zu filmen.
In unserem Beispiel möchtest Du von einem Flußufer aus filmen, wie eine Brücke aussieht.
Dazu willst Du nah an die Brücke heranfliegen und dann seitwärts die ganze Brücke filmen.
Ist man nun sehr nahe an der Brücke, muß man sehr exakt steuern, sonst kollidiert das Modell schnell mit dem Gebäude.
Der headless-mode erleichtert nun diese Steuerung ungemein. Dadurch, daß das Modell genau den Steuerknüppel-Bewegungen folgt und nicht deren Funktion umkehrt, kannst Du auch rückwärts von der Brücke wegfliegen und tolle Schwenks mit der Kamera machen, ohne umdenken zu müssen.
Zu beachten:
Einige Hersteller ermöglichen es nicht, den headless-mode einfach während des Fluges zuzuschalten. Das würde zu unerwarteten Ergebnissen führen.
Bei diesen Modellen müssen Sender und Quadcopter beim Einschalten des headless-mode zunächst exakt gleich ausgerichtet sein.
Das bedeutet der Copter muß in diesem Moment in einer geraden Achse von der Fernbedienung wegfliegen bzw. wegzeigen.
Viele Hobbypiloten empfehlen, daß man das Steuern des Quadcopters OHNE headless-mode erlernen sollte. Hat man sich durch intensives Üben die sich stets ändernden Bewegungsabläufe des Modells erst einmal verinnerlicht, kommt man ohne den headless-mode oft sicherer und besser zurecht.
Das ist vor allem dann wichtig, wenn man nach dem Quadcopterfliegen eventuell Lust darauf hat, das Fliegen eines richtigen Hubschraubermodells zu erlernen.
Suchbegriffe
- Was ist Headless-Mode?
- Was bedeutet Headless Mode
- Erklärung Steuerfunktion Headless Mode
- Was bedeutet Directional Command Mode (DCM)
- Erklärung Directional Command Mode (DCM)
Auf der Titelgrafik siehst Du noch einmal ganz genau, was gemeint ist.